.png&blockId=25e122c4-3078-805e-835c-fc1da95f657d)


AMR (Latent Series Robot)
AMR (Latent Series Robot) is a product developed and designed according to the actual needs of material transportation. It has the characteristics of group intelligence, independent efficiency, industrial application, etc. It can place pallets, material racks, material boxes and other goods on the car body, and realize automatic transportation to the designated place through platform lifting shelves. It can stop at stations along the way or at designated stations. It is suitable for production systems with frequent transportation and flexible material turnover. The products have complete independent intellectual property rights and a number of core patents, and their performance has reached the international first-class level. They can meet the different needs of automated factories and intelligent warehousing.
product features and advantages
•
Croud Intelligence:is equipped with KeTi's independent research and development vehicle-mounted system and dispatching system, which can realize the simultaneous dispatching and operation of thousands of vehicles;
•
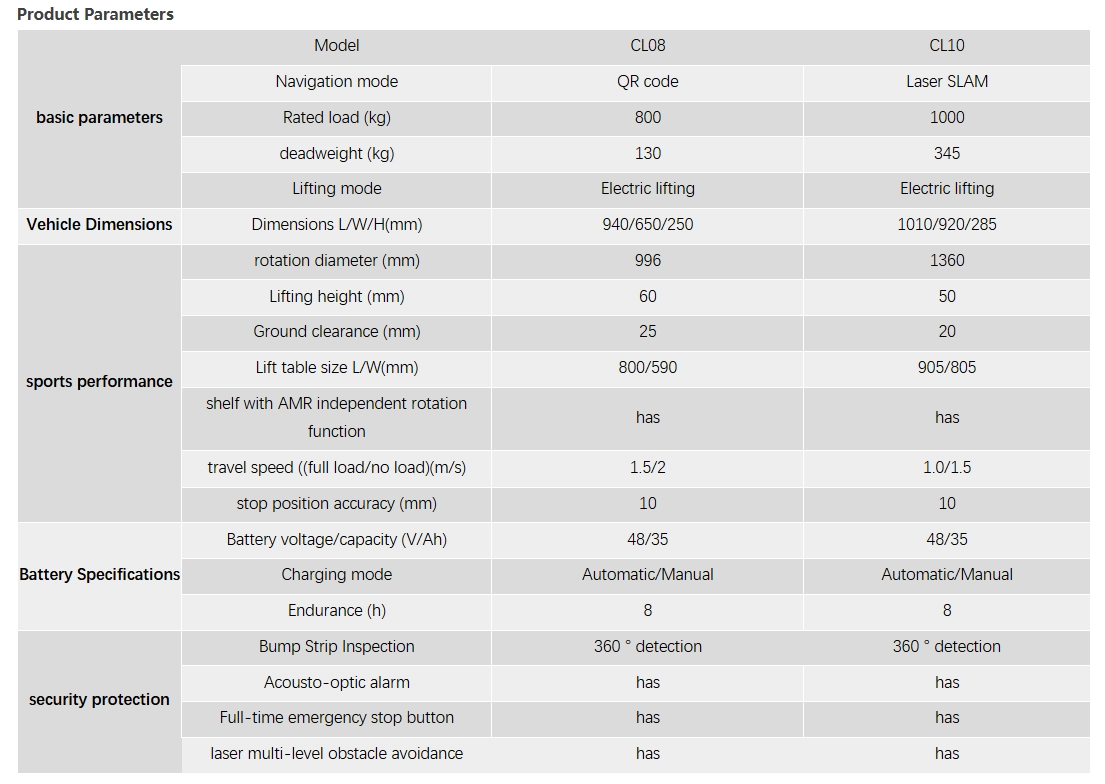
Industrial:The design is compact and small, the body material is solid and durable, the lifting components are strongly optimized, the driving performance is upgraded, and the load capacity can reach 1000kg, enabling more industrial scene applications;
•
High precision positioning and navigation:C- Navi high-precision laser/laser SLAM navigation technology independently developed by Keti, the repeated positioning accuracy can reach millimeter level, the navigation accuracy is 10mm, and the stop accuracy is 10mm;
•
Flexible Motion Control:adopts two-wheel differential drive, supports forward, backward, rotation and other motion control, and the motion process is smooth and compliant;
•
Multi-machine group intelligence collaboration:distributed multi-machine group intelligence collaboration technology, powerful algorithms and hardware support, truly decentralized, realize autonomous decision-making, efficient path planning and traffic coordination of mobile robots, reduce the high computing power requirements of central computing nodes, and coordinate more than 1000 robots at the same time;
•
Minimal human-computer interaction:vehicle-mounted touch control, simple button-type task distribution, on-call; hand-to-self integration, on-demand, to achieve efficient man-machine collaboration; simple map editing and key generation of work order tasks to achieve rapid deployment and change;
•
Multiple security:Support multi-level safety protection such as front long-distance detection, front short-distance detection, 360 ° detection, front/rear emergency stop button, etc., to achieve safe and reliable motion control.